Снимка Pixabay
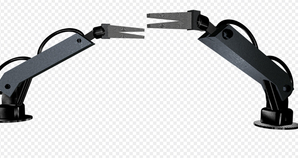
Вдъхновени от подвижността на слонския хобот и пипалата на октоподите, китайски учени са разработили сръчна спираловидна мека роботизирана ръка, която е сравнима с човешката при множество задачи за хващане, предаде "Синхуа", цитирани от Нова ТВ.
Демонстрационни видеоклипове показват впечатляващите възможностите на наподобяващата пипало роботизирана ръка. Тя е в състояние без усилие да хваща деликатни предмети като яйца, ягоди и USB кабели, да улавя безпроблемно бързодвижеща се топка за тенис или прецизно да удря топче за пинг-понг.
Изследователите от Китайския университет за наука и технологии са използвали техники на обратното инженерство, за да симулират гъвкавите спираловидни структури, които се срещат в природата.
Роботизираната система SpiRobs демонстрира сложни маневри за улавяне чрез серия от движения, включително навиване, разтягане, усукване и хващане, като успеваемостта й е почти 95 процента.
Според учените задвижваната от два или три кабела ръка е в състояние да поддържа до 260 пъти по-тежки товари от собственото си тегло.
Екипът освен това е използвал 3D печат с достъпни материали като полиуретан, смола и хартия, за да произведе прототипи в различни мащаби - от сантиметри до метри, като по този начин е увеличил търговския им потенциал.
В полеви тестове оборудваната с дрон роботизираната ръка е успяла умело да хване и повдигне кофа с вода, демонстрирайки потенциала си за бъдеща употреба в т.нар. "икономика на ниска надморска височина", отбелязва Синхуа.
За реклама в "Петел" на цена от 60 лева без ДДС на ПР публикация пишете на info@petel.bg
Следете PETEL.BG всяка минута 24 часа в денонощието!
Изпращайте вашите снимки на info@petel.bg по всяко време на дежурния редактор!
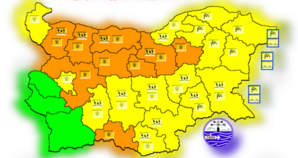
9 области в България с оранжев код на Коледа
Дата: 24/12, 17:59

Марин льо Пен: Дните на новото френско правителство са преброени
Дата: 24/12, 17:51

Марая Кери счупи нов рекорд с вечния си коледен хит
Дата: 24/12, 17:41

Карлос Насар призна голяма лична болка
Дата: 24/12, 17:32

Путин поздправи официално Вучич за празниците
Дата: 24/12, 17:26